ARTIGO ORIGINAL
MOURA, Anderson Rodrigues [1], NUNES, Danilo Magalhães [2], PAIVA, Edinei Canuto [3]
MOURA, Anderson Rodrigues. NUNES, Danilo Magalhães. PAIVA, Edinei Canuto. Automatização De Coletor Solar Para Produzir Água Destilada. Revista Científica Multidisciplinar Núcleo do Conhecimento. Ano 03, Ed. 12, Vol. 04, pp. 45-84 Dezembro de 2018. ISSN:2448-0959
RESUMO
Neste trabalho é apresentando o desenvolvimento de um protótipo de um sistema de automação de um coletor solar rastreador. Este sistema deve verificar as áreas de maior incidência radiação na abóboda celeste através de sensores e enviar a um processador que identifica a necessidade de fazer um ajuste da posição de um coletor solar parabólico. O coletor solar consiste numa superfície paraboloide capaz de concentrar a radiação solar numa região focal, onde foi colocado um receptor de radiação. O receptor de radiação é na verdade uma caldeira de destilação de água aquecida por radiação solar concentrada, refletida pela superfície refletora. Este trabalho se originou de um projeto de iniciação tecnológica, “montagem de um rastreador solar”, financiado pelo conselho nacional de pesquisa, a partir do ano de 2013. Para o desenvolvimento do protótipo do circuito micro controlado foi utilizado a plataforma de prototipação, open source e open hardware, Arduino, para o software de simulação e desenvolvimento de circuitos. Ao final do trabalho, se verificou a viabilidade econômica e mediante observação do funcionamento e realização de testes de campo, foi comprovada a eficiência do circuito e software do protótipo desenvolvido: na tarefa de regular a posição do concentrador de forma perpendicular à direção da radiação solar.
Palavras–chave: Rastreador Solar, energia solar, microcontrolador, protótipo.
INTRODUÇÃO
O sol é uma fonte de energia limpa, este recurso energético vem sendo utilizado cada vez mais intensamente pela humanidade através de métodos de transformação da energia solar, tais como: coletor solar, estufas, fornos para altas temperaturas etc. (OLIVEIRA,2008).
Em países como Japão, EUA, Alemanha e outros países europeus vêm sendo desenvolvidos mecanismos regulatórios específicos para estimular seu uso, investigando desde as características do fluxo de radiação solar que chega à Terra até a tecnologia necessária para viabilizar, em termos técnicos e econômicos, o aproveitamento dessa energia (VARELLA, CAVALEIRO & SILVA,2008).
O interesse pela utilização da radiação solar como fonte de energia alternativa cresceu muito nas últimas décadas, por razões econômicas, principalmente após a crise do petróleo de 1973, quando os estudos nessa área receberam grande impulso nos Estados Unidos e na Europa. Hoje, esse interesse está adquirindo maior dimensão, abrangendo não só o aproveitamento da radiação como fonte de energia limpa e renovável, mas também o conhecimento do clima e de suas mudanças, como uma questão crucial, que envolve a própria manutenção da vida na Terra (CRESESB, 2006).
Por suas características tropicais, o Brasil tem, em quase todo o território e durante o ano inteiro, grande potencial de oferta de energia solar. Enquanto nos países de clima temperado o pico de uso da energia elétrica ocorre no inverno, exatamente quando a insolação é mínima, no Brasil acontece o contrário, o que aumenta a atratividade do uso da energia solar (Colle e Pereira, 1998; Tiba, 2000 apud PAIVA,2008).
Pode-se dizer que a longo prazo, a energia solar poderá trazer benefícios para o país, pelo fato de ser renovável e por colaborar na despoluição de áreas urbanas e diminuir a dependência em relação ao petróleo (Colle e Pereira, 1997).
Como qualquer outra fonte de energia, a solar também possui alguns desafios a serem superados. A Uniformidade é um dos maiores problemas a serem trabalhados. Apesar disso a radiação solar é distribuída de forma mais uniforme que a biomassa ou mesmo os ventos, o que dá maiores possibilidades de aproveitamento. Outra característica, no aspecto econômico, é o fato de que esta fonte minimiza os custos operacionais, uma vez que os dispêndios no item “combustível” não existem.
O estudo da tecnologia e a avaliação dos concentradores solares são importantes pelo fato de servir como referência para outras instituições, considerando o caráter pioneiro dessa tecnologia no país (PAIVA,2008).
2. OBJETIVO GERAL
Desenvolver um protótipo que vise para automatizar um coletor solar concentrador para um sistema de orientação automático e controlar o fluxo de água enviado ao rastreador com objetivo de economizar água.
3. OBJETIVOS ESPECÍFICOS
Montar um sensor que colete dados de incidência luminosa;
Montar um sistema que interprete os dados luminosos e rastreie as áreas de maior incidência solar do céu;
Coletar dados de temperatura de entrada e saída da água do coletor;
Montar um sistema em que controle a admissão de água enviado a caldeira após a temperatura estiver acima de 100ºC;
Simular o circuito de rastreamento e acionamento em ferramenta gráfica;
4. JUSTIFICATIVA
Este projeto visa criar um protótipo de um sistema micro controlado para automatizar um rastreador solar concentrador feito no projeto “montagem de um rastreador solar PIBIT/2014” e fazer uma análise do custo de implementação do mesmo.
5. REFERENCIAL TEÓRICO
5.1 COLETOR CONCENTRADOR SOLAR
Os coletores solares são aquecedores de fluidos (líquidos ou gasosos e são classificados em coletores concentradores Figura 1 e coletores planos figura 2, em função da existência ou não de dispositivo de concentração da radiação solar. (PINHO & GALDINO,2014).
A tecnologia de energia solar concentrada possibilita o acúmulo de energia provinda do sol sobre um receptor, com isso o sistema opera numa faixa de temperatura superior à de coletores planos, atingindo, em torno de 100ºC a 400ºC que podem ser utilizados por exemplo para acionamento de turbinas a vapor e posterior geração de eletricidade (PINHO & GALDINO,2014).
Figura 1: Coletor solar concentrador do projeto “Montagem de um coletor solar”

Figura 2 : Coletor solar plano

5.2 SEGUIDOR SOLAR
Seguidor solar é um dispositivo que permite o ajuste de ângulo de um coletor solar de tal forma que esteja sempre voltado para o sol. O seguimento solar pode ser atingido a partir de cálculos de posicionamento do conjunto de conversão de energia, onde são considerados como parâmetro como declividade terrestre, latitude, ângulo horário, dia do ano, etc. Mas na maioria das aplicações de sistemas ativos de seguimento, arranjos de sensores óticos são o suficiente para determinar a posição solar através de sistemas eletrônicos. (PAIVA,2008).
5.3 MICRO CONTROLADOR
Segundo Fonseca (2010), o Arduino figura 3 é uma plataforma de composição física, formada por uma simples placa de Entrada/Saída micro controlada e desenvolvida através de uma biblioteca que facilita a escrita da programação em C/C++. É uma ferramenta de baixo custo, flexível e de simples aplicação, principalmente para iniciantes em projetos de automação/programação. O Arduino pode ser usado para desenvolver sistemas interativos, admitindo a entrada de uma série de sensores ou chaves, e controlando uma variedade de saídas físicas.
Projetos com Arduino podem ser independentes, ou podem se comunicar com outros softwares (android, php, java) os circuitos podem ser montados a mão ou comprados pré montados. Além do mais, o software de programação de código livre pode ser obtido gratuitamente em seu website.
Figura 3 : Arduino uno
5.4 LDR LIGHT DEPENDENT RESISTOR
O LDR ilustrado na figura 4 é composto de um material semicondutor, o sulfeto de cádmio, CdS, ou o sulfeto de chumbo. O processo de construção de um LDR consiste na conexão do material fotossensível com os terminais, sendo que uma fina camada é simplesmente exposta à incidência luminosa externa.
Também chamado de célula fotocondutiva, ou ainda de foto resistência, o LDR é um dispositivo semicondutor de dois terminais, cuja resistência varia linearmente com a intensidade de luz incidente, obedecendo à equação 1, em que L é a luminosidade em Lux, C e a são constantes dependentes do processo de fabricação e material utilizado.
Como foi dito anteriormente o LDR tem sua resistência diminuída ao ser iluminado. A energia luminosa desloca elétrons da camada de valência para a de condução (mais longe do núcleo), aumentando o número destes, diminuindo a resistência.
Conforme aumenta a intensidade de luz incidente no LDR, um número maior de elétrons na estrutura tem também seu nível de energia aumentado, devido à aquisição da energia entregue pelos fótons. O resultado é o aumento de elétrons livres e elétrons fracamente presos ao núcleo.
Na figura 5 mostra os detalhes de que o LDR e constituído.

Figura 4: Sensores Fotoelétricos – LDR.
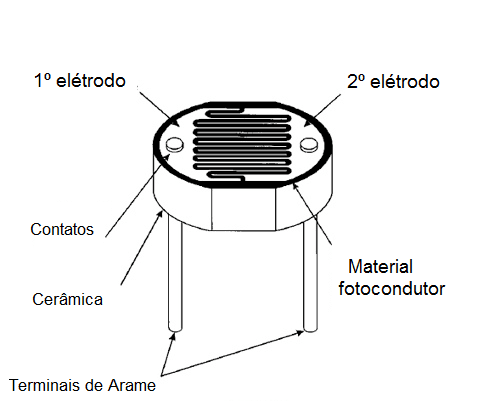
Figura 5 LDR Detalhado
5.5 PWM
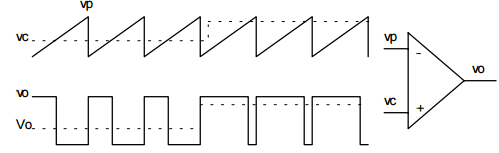
A modulação por largura de pulso (PWM – Pulse width Modulation) é um método em que a tensão de saída é uma onda modulada por largura de pulso, controlada pela variação da duração dos pulsos. (AHMED,2000).
Em PWM opera-se com frequência constante, variando-se o tempo em que a chave permanece ligada. O sinal de comando é obtido, geralmente, pela comparação de um sinal de controle (modulante) com uma onda periódica (portadora) como, por exemplo, uma “dente-de-serra”. Abaixo, a figura 6, ilustra estas formas de onda. Para que a relação entre o sinal de controle e a tensão média de saída seja linear, como desejado, a frequência da portadora deve ser, pelo menos 10 vezes maior do que a modulante, de modo que seja relativamente fácil filtrar o valor médio do sinal modulado (PWM), recuperando o sinal de controle.
Figura 6: Modulação por largura de pulso
Os controles de potência PWM são altamente indicados para aplicações em robótica, mecatrônica e até modelismo pela possibilidade de se manter o torque de motores DC mesmo em baixas velocidades (BRAGA,2016). Circuitos de baixa complexidade utilizando PWM podem controlar motores de 6v alcançar potencias e até 5A utilizando transistores FETs de alta potência.
6. DESENVOLVIMENTO
6.1 MATERIAIS E MÉTODOS
O trabalho foi conduzido, em parte, nos laboratório de física do IFNMG campus Januária e parte na área experimental do setor de Produção Agrícola do Campus Januária no município de Januária- MG, localizada na latitude 15º 28’ 55’’ S e longitude 44º 22’ 41’’ W, altitude de 474 m e clima Aw (tropical úmido com inverno seco e verão chuvoso) de acordo com a classificação de Köppen.
6.2 RECURSOS COMPUTACIONAIS
- Windows 7 ou superior;
- Labcenter Proteus versão 7.7;
- Arduino ide versão 1.6.7;
- Java versão 7;
- Dia portable 0.97.2-2;
- Notepad++;
6.3 RECURSOS MATERIAIS
- Arduino Uno R3;
- Protoboard;
- Bateria 12v
- 2 motores de Corrente continua;
- Tubo PVC;
- Componentes eletrônicos (descritos nas tabelas xx e xxx);
6.4 LEVANTAMENTO DE REQUISITOS
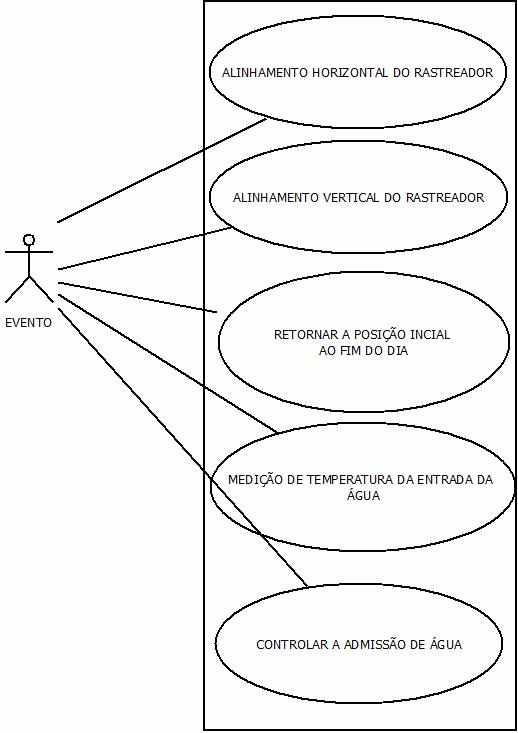
Para desenvolver um sistema utilizando a abordagem orientada a objetos, é útil obter os requisitos e descreve-los com uma técnica conhecida como casos de uso. Um caso de uso descreve a funcionalidade específica que um sistema, supostamente, deve desempenhar ou exibir, por meio da modelagem do diálogo. Que um usuário, um sistema externo ou outra entidade terá com o sistema a ser desenvolvido. (PFLEEGER & SHARI,2004).
6.5 DESCRIÇÃO DOS CASOS DE USO
| Nome do caso de uso | Alinhamento Vertical do Rastreador |
| Ator(es) Principal(is) | Evento[1] |
| Ator(es) Secundários(is) | |
| Resumo | Este caso de uso descreve as etapas em que o sistema fará o posicionamento Vertical do rastreador solar. |
| Pré – condições | Alteração na incidência luminosa |
| Pós – condições | |
| Fluxo-Principal | 1. Os sensores Verticais de luminosidade fazem a leitura da incidência solar;
2. No micro controlador é executado o teste onde é verificado a diferença luminosa entre os sensores; 3. Se constatado a diferença luminosa significativa entre os sensores acionar o controlador do motor para movimentar o rastreador; |
| Regras de Negocio |
| Nome do caso de uso | Alinhamento Horizontal do Rastreador |
| Ator(es) Principal(is) | Evento[1] |
| Ator(es) Secundários(is) | |
| Resumo | Este caso de uso descreve as etapas em que o sistema fará o posicionamento horizontal do rastreador solar. |
| Pré – condições | Alteração na incidência luminosa |
| Pós – condições | |
| Fluxo-Principal | 1. Os sensores horizontais de luminosidade fazem a leitura da incidência solar;
2. No micro controlador é executado o teste onde é verificado a diferença luminosa entre os sensores; 3. Se constatado a diferença luminosa significativa entre os sensores acionar o controlador motor para movimentar o rastreador; |
| Regras de Negocio |
| Nome do caso de uso | Retornar a posição inicial ao fim do dia |
| Ator(es) Principal(is) | Evento[1] |
| Ator(es) Secundários(is) | |
| Resumo | Este caso de uso descreve as etapas em que o sistema fará a verificação do fim do dia (noite) e acionará o rastreador para uma posição definida como inicial. |
| Pré – condições | Alteração na incidência luminosa |
| Pós – condições | |
| Fluxo-Principal | 1. Será executada a leitura dos sensores horizontais e verticais de luminosidade;
2. No micro controlador será verificado se existe incidência luminosa; 3. Se constatado incidência luminosa nula ou insignificante movimentar o rastreador para posição determinada; |
| Regras de Negocio |
| Nome do caso de uso | Medição de temperatura da entrada da água |
| Ator(es) Principal(is) | Evento[1] |
| Ator(es) Secundários(is) | |
| Resumo | Este caso de uso descreve as etapas em que o sistema fará o medição da temperatura da entrada da água no destilador |
| Pré – condições | Deve haver incidência solar para ser medida a temperatura |
| Pós – condições | |
| Fluxo-Principal | 1. Será executada a função para detecção de incidência luminosa;
2. Se detectada a incidência luminosa o sensor de temperatura da água fará a leitura; |
| Regras de Negocio |
| Nome do caso de uso | Controlar a admissão de água |
| Ator(es) Principal(is) | Evento[1] |
| Ator(es) Secundários(is) | |
| Resumo | Este caso de uso descreve as etapas em que o sistema fará o controle do fluxo de água enviado a caldeira de aquecimento |
| Pré – condições | Deve haver incidência solar para ser medida a temperatura da água; |
| Pós – condições | |
| Fluxo-Principal | 1. Será executada a função para detecção de incidência luminosa;
2. Se detectada a incidência luminosa o sensor de temperatura da água fará a leitura; 3. O sistema fará uma verificação no sensor da entrada da caldeira para verificar se a temperatura está em 100 ou mais graus célsius; 4. Se constatado a temperatura enviar comando para o acionador movimentar a antena; |
| Regras de Negocio |
6.6 REPRESENTAÇÃO GRÁFICA DOS CASOS DE USO
Figura 7: Representação gráfica dos casos de uso fonte: O autor
6.7 SENSOR FOTOELÉTRICO
De acordo com Thomazini (2005), o sensor é o significado correto para definir dispositivos sensíveis a alguma forma de energia ambiente que pode ser luminosa, térmica, cinética, relacionando informações sobre uma grandeza que precisa ser media, como: temperatura, pressão, velocidade, corrente, aceleração, posição e lumens.
Para interpretação da intensidade dos raios solares pelo sistema, foram utilizados os sensores fotoelétricos. O sensor escolhido foi o LDR por apresentar características favoráveis que atendem às necessidades do projeto e também pelo preço.
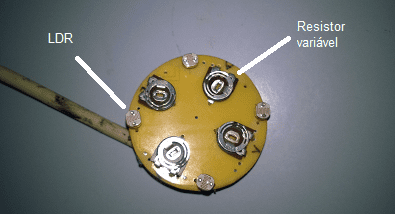
Cada sensor foi utilizado com o uso de um resistor de ajuste (variável) Ra e um LDR, montados em forma de divisor de tensão e o sinal de saída para o micro controlador é dado pela Equação 1. A Figura 8 ilustra o circuito feito para esse fim, em que a resistência Ra é um resistor variável para compensar possíveis diferenças entre os LDRs.
Figura 8: Montagem do sensor
Equação 1
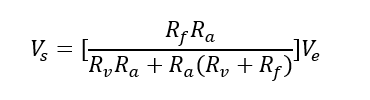
Em que:
Vs = Sinal de tensão medido pelo Micro controlador, em volts;
Rv = Resistência variável com a intensidade da luz (LDR), em ohms;
Ve = Tensão de entrada no divisor, 5 volts;
Ra = Resistência de ajuste, em ohms.
Rf= Resistencia de valor fixo, em ohms.
Os pares de sensores foram montados no interior de um tubo opaco de policloreto de polivinila (PVC) figura 9 e figura 10 e recebem a mesma radiação quando o sistema se encontrava voltado para o sol (alinhado). Quando ocorre um desvio ou mudança nas condições de iluminação, o sinal gerado por um ou mais sensores do par fica diferente o suficiente para provocar uma tomada de decisão do micro controlador.
Figura 9: Sensor montado em tubo opaco (vista lateral).

Figura 10: Sensor montado em tubo opaco (vista superior).

6.8 SISTEMA DE RASTREAMENTO
O sistema de controle eletrônico do seguidor usa um micro controlador, que faz o gerenciamento de todas as funções do sistema. As funções controladas são:
- Sensoriamento das regiões mais claras do céu;
- Início e fim de curso; com o sensoriamento de luz do dia e noite;
- Controle do motor e reversão de sentido do mesmo;
- Não movimentação do sistema em períodos de ausência de radiação;
- Permite rastreamento em dois eixos.
O funcionamento do sistema de rastreamento é dividido em 3 etapas como ilustrado na figura 11:
Figura 11: Diagrama de Funcionamento do sistema de rastreamento

O bloco “Aquisição” fornece os sinais analógicos dos sensores (LDR) para o micro controlador.
O “Controlador” nesta etapa o micro controlador recebe os dados analógicos vindos dos sensores e nele será interpretado os dados onde será realizada a tomada de decisão para o acionamento dos motores para o movimento do rastreador.
O “Acionador” consiste nos circuitos responsáveis pelo acionamento, controle de velocidade e sentido dos motores.
O bloco “controlador” é onde fica o centro deste trabalho, nele está o micro controlador Atmega328p da Atmel® figura 12.
Figura 12: ATMEGA328P
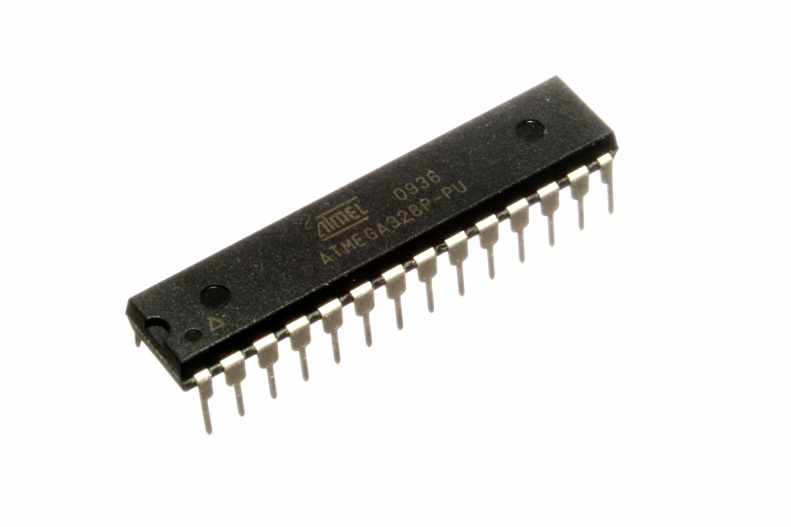
Para o uso desse micro controlador foi utilizada a plataforma de prototipação Arduino que constitui em seu processador este mesmo micro controlador, e o software de simulação e montagem de circuitos Proteus que é uma referência em todo mercado.
Para representar o código desenvolvido foi utilizado fluxograma que é uma representação gráfica do algoritmo, através de formas geométricas, facilitando a compreensão da lógica utilizada pelo profissional (UNISAL,2016).
Na figura 13 é apresentado o fluxograma principal do programa de controle do sistema de seguimento solar.
Figura 13: Fluxograma representado o código do rastreamento
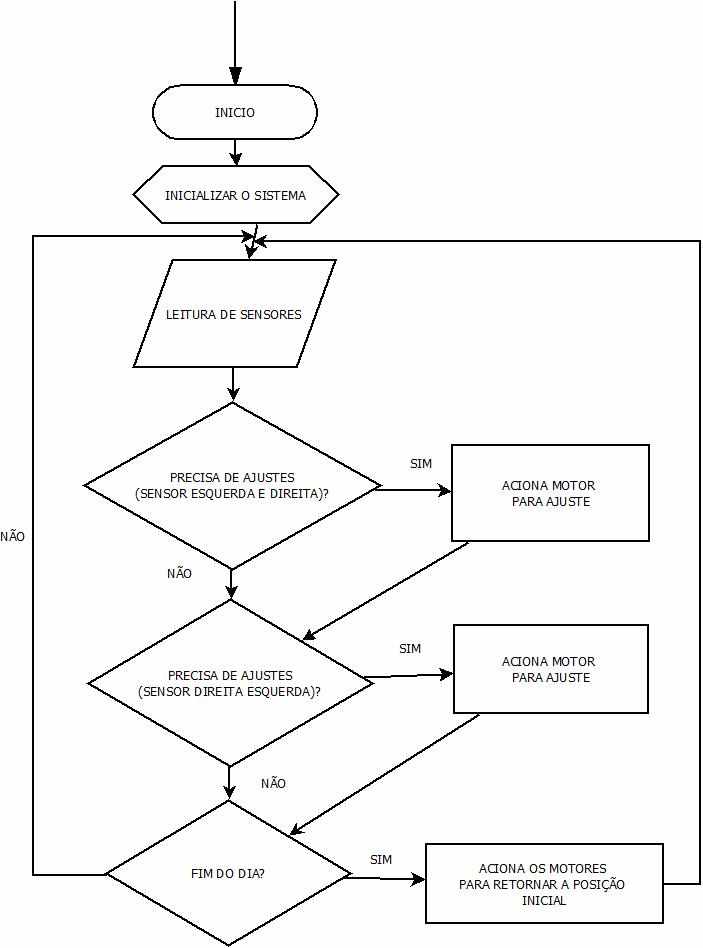
Percebe-se pelo fluxograma que o sistema fica em um loop infinito fazendo a leitura dos sensores de temperatura e fazendo a verificação da necessidade de ajuste no coletor solar. Esse sistema está projetado para funcionar de forma interrupta e sem a ação humana dia e noite.
6.9 CONTROLE DE ACIONAMENTO
Para o controle de acionamento e regulagem de rotação e sentido dos motores de eixo X e Y foi construído uma ponte H com controle PWM.
7. PWM
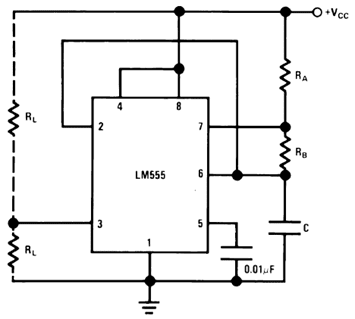
Para gerar o sinal PWM foi utilizado o CI timer 555 em modo astável, figura 14. O timer 555 associa um oscilador de relaxação, dois comparadores, um flip-flop RS e um transistor de descarga. Este CI é versátil tantas aplicações, que se tornou um padrão industrial (MALVINO).
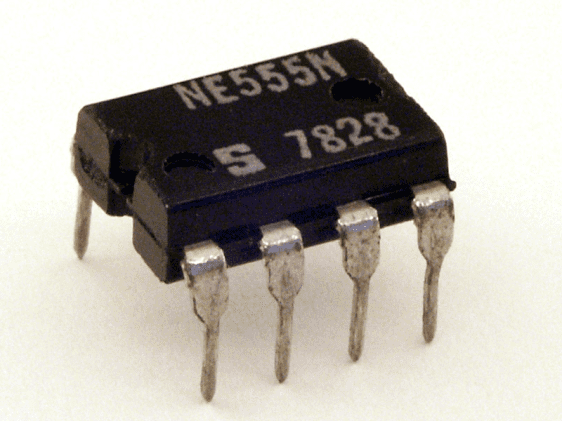
O manual de características técnicas (datasheet) do 555 nos fornece o diagrama para montagem figura 10 e as equações para frequência do CI no modo astável, para uma frequência igual a aproximadamente 50Hz por exemplo, arbitra-se um valor de para o resistor e para o capacitor .
Isola-se na equação, para que o mesmo seja determinado
Atribuindo os valores resulta:
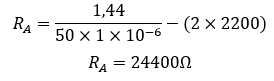
Como não existe um resistor comercial de , utiliza-se um valor comercial próximo, de 27kΩ .
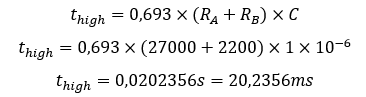
A partir dos resistores Ra e Rb, pode-se calcular o tempo em que a saída permanecerá em nível alto com a seguinte equação
Agora aplicam-se os valores comerciais na equação da frequência, para calcular posteriormente o período total
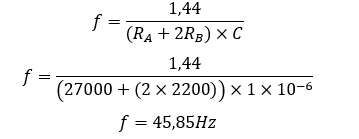
Que resultou em um valor próximo dos 50Hz arbitrados para o projeto. Sabe-se que o período total é inversamente proporcional à frequência
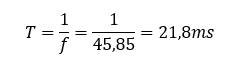
Portanto, o tempo em que a saída fica em nível baixo é:
Figura 15: Diagrama 555 modo astável
![]()
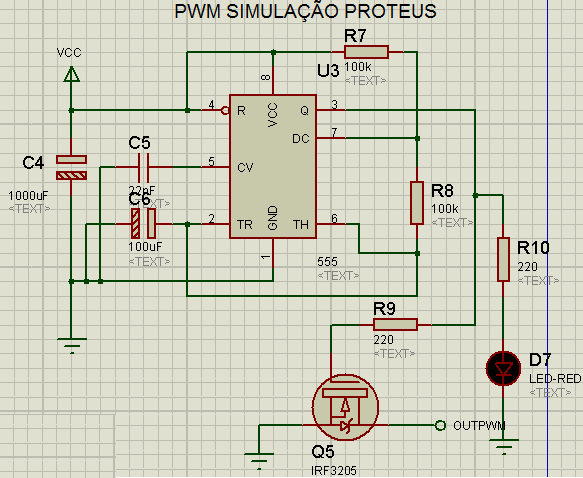
Com o Proteus o circuito PWM foi montado e simulado utilizando na saída do oscilador um transistor FET de potência para chavear os motores do sistema figura 16.
Figura 16: Simulação PWM no Proteus
7.1 PONTE H
Segundo (Braga,2016) Dois circuitos são fundamentais em qualquer aplicação que envolva motores de corrente contínua as pontes H e controles PWM. A construção de uma ponte H neste projeto é algo essencial para o acionamento e reversão dos motores. A ponte H foi prototipada e construída usando componentes discretos tais como transistores, diodos e resistores e de forma independente do circuito controlador figura 17 e figura 18.
Figura 17: Esquema da ponte H prototipada no Proteus
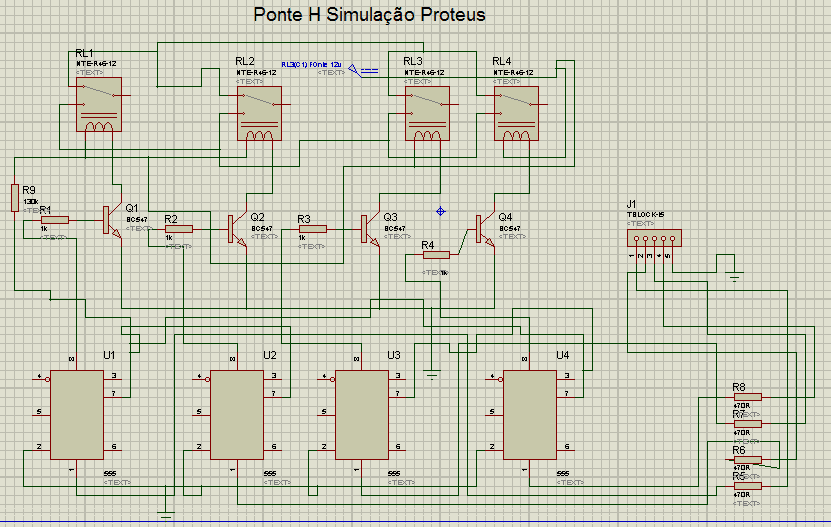
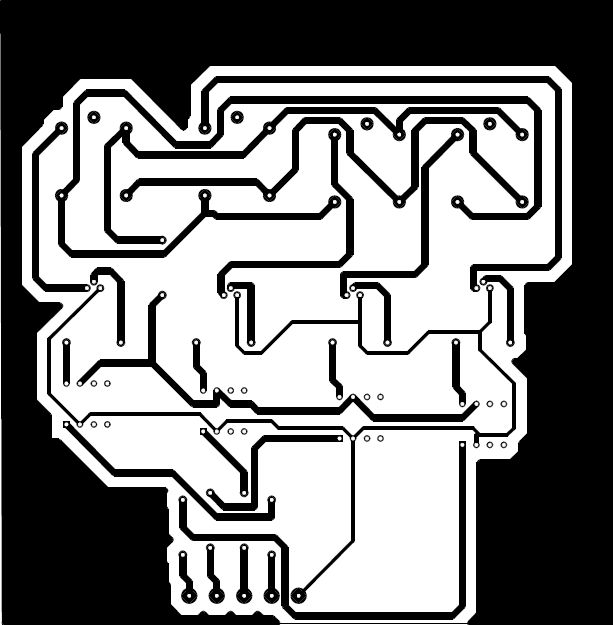
Figura 18: Circuito para impressão
Quadro de componentes da ponte h com controle PWM
| COMPONENTE | QUANTIDADE | DESCRIÇÃO |
| Timer 555 | 1 | Ci oscilador |
| Relés | 4 | Relé bobina de 12v |
| Transistor | 4 | Bc 547 npn |
| Transistor | 1 | IRF3205 |
| Led | 1 | Led difuso vermelho |
| Capacitor | 2 | Capacitor eletrolítico |
| Capacitor | 1 | Capacitor cerâmico |
| Diodo | 4 | Diodo retificador 1n4001 |
| Conectores | 4 | Conector barra pinos macho |
| Resistores | 4 | Resistores de 100 Ohms |
| Resistores | 4 | Resistores de 1k |
7.2 CONTROLE DE ADMISSÃO DE ÁGUA
Para a uma maior eficiência do rastreador solar foi desenvolvido um sistema para controlar o fluxo de água enviado a caldeira figura 19.
Figura 19: Caldeira no centro do foco do concentrador solar

Este controle é necessário pois sem ele o sistema de aquecimento não tem controle se a caldeira está em temperatura adequada para ferver a água enviada a câmara de destilação ocorrendo desperdício de água já que para o processo de destilação a água deve está em estado de ebulição, e durante a noite o sistema não precisaria da ação humana para fechar o fluxo de água tornando o sistema totalmente automático. A temperatura adequada é de 100ºC (temperatura de ebulição da água).
Para esse controle é feita medição da temperatura da água, são recebidos dados de temperatura gerados a partir do sensor de temperatura a prova d’água DS18B20 figura 20. DS18B20 é um termômetro digital que fornece medições de temperatura entre 9 e 12 bits de resolução com precisão de ~0.5ºC (MAXIMINTEGRATED, 2016).
Após constatado a temperatura em 100ºC o sistema micro controlado envia um sinal de acionamento para uma válvula solenoide de 12v que libera a entrada da água para a caldeira.

7.3 TESTES E RESULTADOS
Na última etapa do trabalho foram realizados testes para validação do protótipo e comprovação de seu funcionamento e eficiência. Dentre estes testes destaca-se o circuito de controle de acionamento confeccionado em fenolite para validar a parte mais crítica do projeto. A seguir será descrito os principais testes.
7.4 TESTE EM FERRAMENTA GRÁFICA
O controle de acionamento e o sensor de leitura de dados luminosos foi simulado em ferramenta gráfica figura 21 para realização de testes. Este teste é fundamental de início pois eventuais erros de ligação ou cálculos que poderiam acarretar danos permanentes ao equipamento são nulos com este teste.
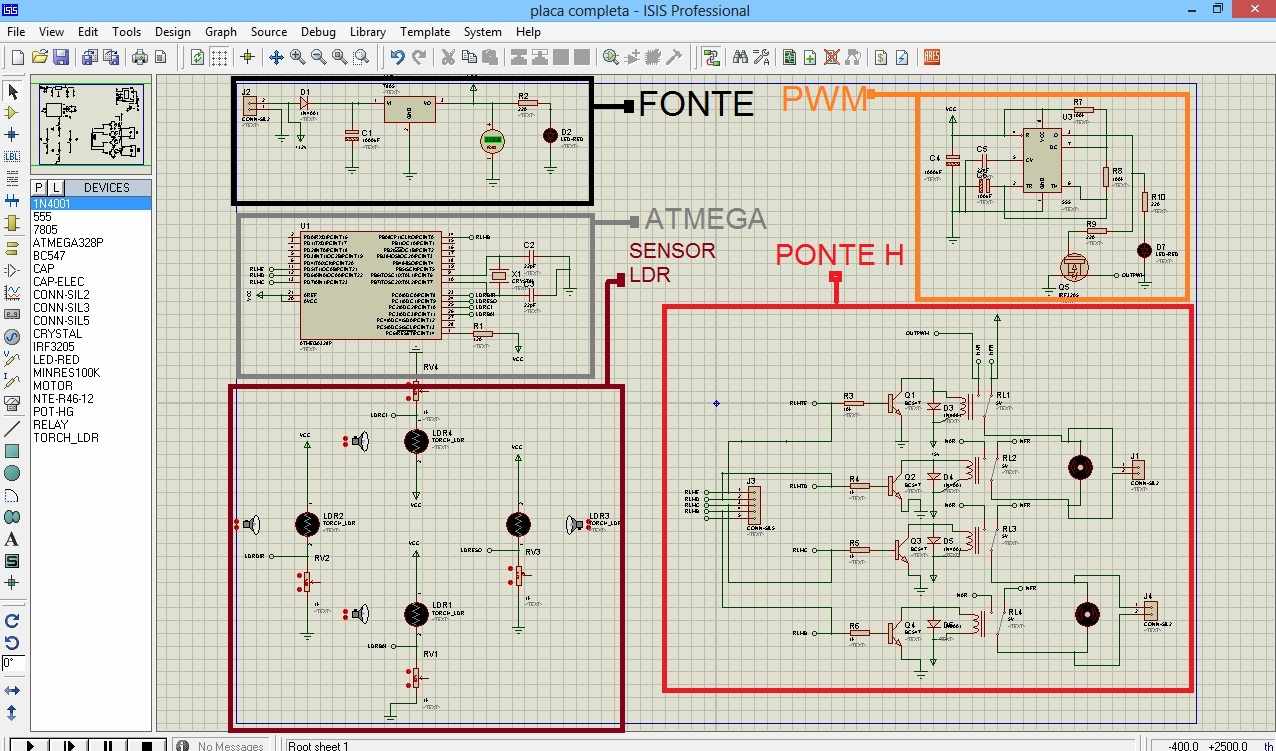
Figura 21: Simulação do sistema de rastreamento
Os testes realizados nesta etapa se mostraram eficazes e comprovaram de forma teórica o funcionamento do circuito proposto.
Esta simulação pode ser conferida na máquina virtual anexada ao trabalho.
7.5 TESTE EM BANCADA
Este teste foi realizado para verificar o sistema de leitura dos sensores de luminosidade. Para isto foi montada parte do protótipo em protoboard e com auxílio da lanterna do celular para simular a o movimento do sol conforme ilustra a figura 22. Neste teste o sistema de sensores foi alimentado pela porta USB do computador e os valores obtidos pelos sensores foram lidos através do programa gravado no micro controlador e observados no monitor serial da ide da plataforma arduino figura 23.
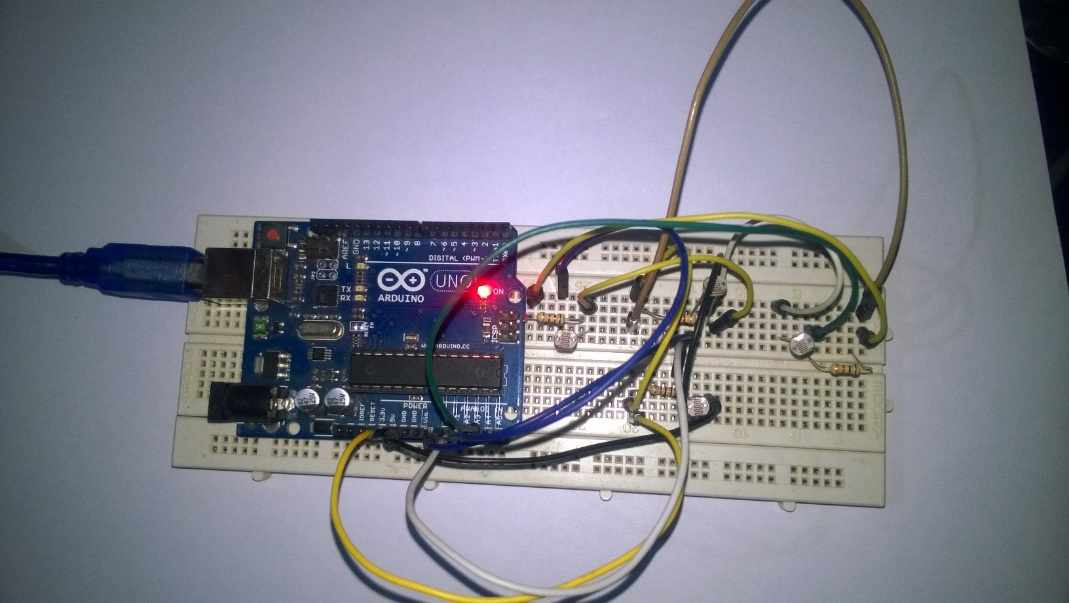
Figura 22: Montagem do sensor de lumisidade em protoboard
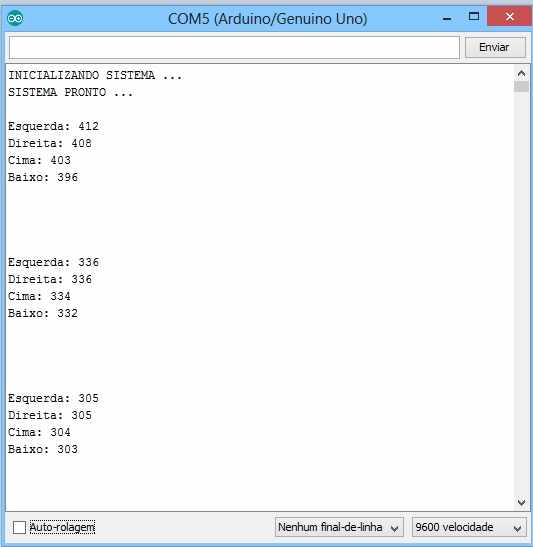
Figura 23: Saída dos dados no serial monitor da ide do arduino
Este teste teve resultados positivos pois através dele é validado a necessidade de resistores de ajuste para amenizar as diferenças de leitura ocorridas entre os ldr(s), esta diferença apesar de mínima é natural entre componentes eletrônicos.
7.6 TESTE EM CAMPO
Para a última etapa de testes foi construída para validação e testes o controle de acionamento prototipado e simulado anteriormente. Figuras 24 e 25.

Figura 24: Circuito acionador ponte H com PWM (Cima)
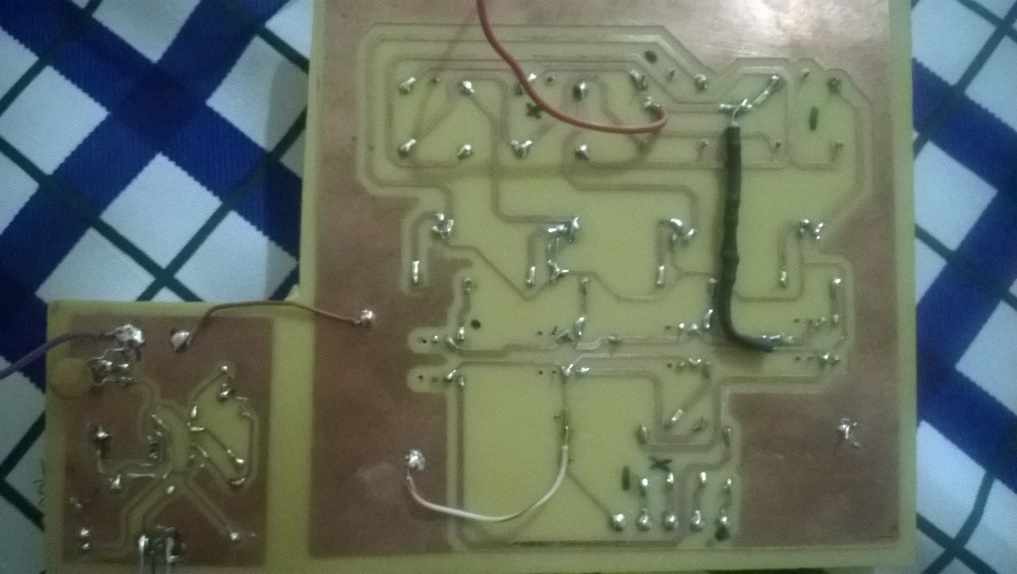
Figura 25: Circuito acionador ponte H com PWM (baixo)
Para obter maior segurança e organização o sistema de controle foi montado em uma caixa de madeira não selada para dissipação do calor já que o sistema atua em alta potência 60w e para obter maior estabilidade pois o sistema é usado em ambiente externo sujeito a interferências e sujeira (figura 26).
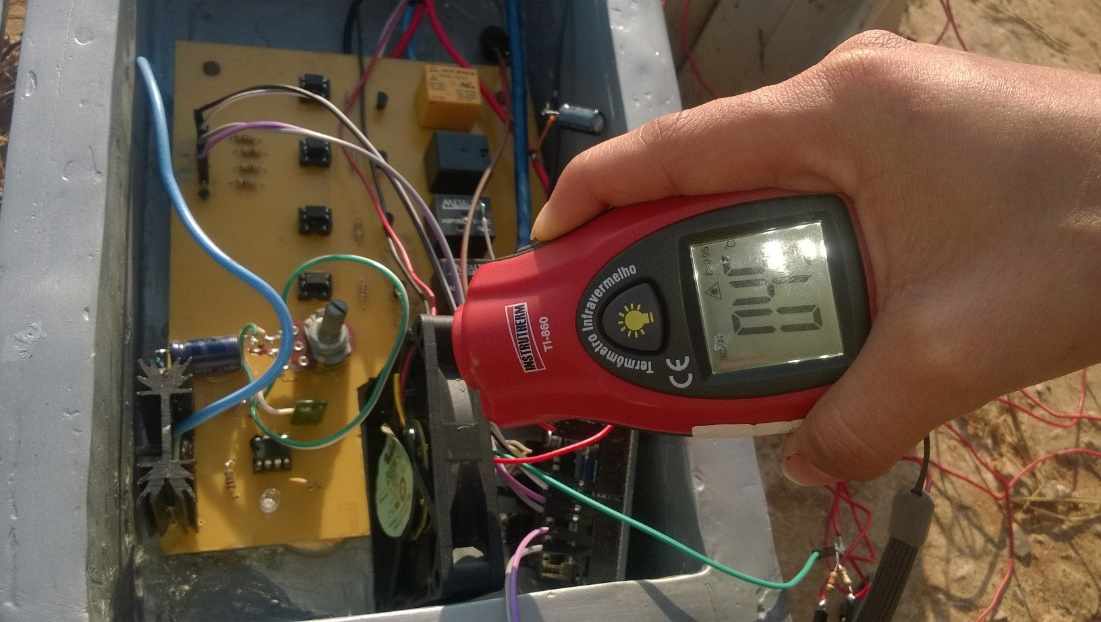
Figura 26: Sistema montado na caixa de madeira
Os testes de campo em ambiente externo foram realizados em dias de alta incidência luminosa e dias parcialmente nublados permitindo que a incidência direta sobre o sensor fosse suficiente para validar o funcionamento do protótipo.
Durante os testes houve a necessidade de remover o concentrador pois ocorreu uma falha mecânica no eixo horizontal, a catraca acoplada ao motor não resistiu a força contrária aplicada ao sistema já que este acionava muitas vezes contra o vento e estava acarretando instabilidade no sistema, a remoção do concentrador nada interfere nos testes de rastreamento. Sem o concentrador acoplado figura 27 o sistema respondeu bem aos testes realizados. Houve a necessidade de ajustes nas constantes de “margem de erro” no código do micro controlador pois a incidência luminosa dos raios solares e maior do que a luz artificial aferida nos testes de bancada.
O sistema de rastreamento mostrou-se eficiente e confiável nos testes realizados mesmo em momentos em que o sol esteve coberto por nuvens o sistema permaneceu parado já que neste caso os raios solares foram dissipados, fazendo com que a quantidade de raios sobre cada ldr fosse igual.

Figura 27: Sistema de rastreamento em teste sem o concentrador fonte: O autor
Ainda com o concentrador acoplado foi possível realizar os testes de admissão de água na caldeira, para o controle mecânico de admissão foi posicionada a válvula solenóide atrás do concentrador conforme ilustrado na figura 28. Para verificar a precisão da medição de temperatura foi utilizado termômetro e temperatura digital. Após aferir a temperatura com termômetro digital contatou-se q uma diferença de 0.7 ºC essa diferença é aceitável e está prevista no datasheet do sensor.

Figura 28: Válvula solenóide acoplada ao concentrador solar fonte: O autor
CONCLUSÃO
Este trabalho foi proposto um sistema de controle e automação de um rastreador solar, os testes realizados
Os testes realizados se mostraram satisfatórios. Este
Fechar com os Objetivos
REFERÊNCIAS BIBLIOGRÁFICAS
ADAFRUIT INDUSTRIES. Photocells a.k.a CdS cells, photoresistors, LD, etc. Disponível
em: <http://www.adafruit.com/blog/2009/05/21/photocells-aka-cds-cells-photoresistors-ldrlight-
dependent-resistor/>. Acessado em: 8 maio. 2016.
PFLEEGER, Shari Lawrence. Engenharia de software: teoria e prática. Prentice Hall, 2004.
AHMED, ASHFAQ. Eletrônica de Potência; tradução Bazán Tecnologia e Lingüística, revisão técnica João Antonio Martino. 2000.
VO, C. R. 3.1 Modulação por Largura de Pulso-MLP (PWM–Pulse Width Modulation).
Centro de Referência para Energia Solar e Eólica Sérgio de Salvo Brito CRESESB. Energia solar princípios e aplicações. Disponível em < http://www.cresesb.cepel.br/download/tutorial/tutorial_solar_2006.pdf > acessado 12/04/2016
Ecodesenvolvimento, Familias de baixa renda vão economizar 17% de energia com aquecedor solar disponível em:< http://www.ecodesenvolvimento.org/posts/2014/familias-de-baixa-renda-vao-economizar-70-de?tag=energia>. Acesso em 15/08/2016.
INSTRUCTABLES. Arduino for Greenhouse, Garden or Growbox / Updated April 2016. Disponível em.< http://www.instructables.com/id/Arduino-for-Greenhouse-Garden-or-Growbox/step6/Arduino-for-Greenhouse-Garden-or-Growbox-LDR/>. Acesso em 10/04/2016
Autor, título. Disponível em: <website visitado>. Acesso em: coloque a data de acesso: dia, mês e ano.
OLIVEIRA, Maurício Madeira. Análise do desempenho de um gerador fotovoltaico com seguidor solar azimutal. 2008.
FILIPFLOP, MEDINDO TEMPERATURA DEBAIXO D’ÁGUA COM DS18B20. Disponível em < http://blog.filipeflop.com/sensores/sensor-de-temperatura-ds18b20-arduino.html>. Acesso em 21/03/2016
BRAGA, NEWTON. Controle dc PWM. Disponível em < http://www.newtoncbraga.com.br/index.php/110-mecatronica/robotica/783-controle-dc-pwm-mec004 >. Acesso em 12/05/2016
ARDUINO.CC. ARDUINO UNO REV3. Disponível em < http://store-usa.arduino.cc/products/a000066>. Acesso em 15/02/2016
555 Timer IC. WIKIPEDIA. Disponível em <https://en.wikipedia.org/wiki/555_timer_IC>. Acessado em 12/04/2016
VARELLA, F. K. O. M.; CAVALIERO, Carla Kazue Nakao; SILVA, E. P. Energia solar fotovoltaica no Brasil: Incentivos regulatórios. Revista Brasileira de Energia, v. 14, n. 1, p. 9-22, 2008.
PAIVA, Edinei Canuto et al. Desenvolvimento de um rastreador solar microcontrolado para um coletor solar concentrador. 2009.
THOMAZINI, D. Sensores Industriais: Fundamentos e Aplicação. São Paulo: Érica. 2005
PINHO, João T.; GALDINO, Marco A. Manual de engenharia para sistemas fotovoltaicos. Rio de Janeiro: Cepel-Cresesb, 2014.
ATmega328. WIKIPEDIA. Disponível em https://en.wikipedia.org/wiki/ATmega328 acessado em 07/08/16
LMC555. National Semiconductor. Disponivel em < http://datasheet.octopart.com/LMC555CN/NOPB-National-Semiconductor-datasheet-7265225.pdf> acessado em 05/06/2016
ATmega48A/PA/88A/PA/168A/PA/328/P. ATMEL. Disponível em: http://www.atmel.com/images/Atmel-8271-8-bit-AVR-Microcontroller-ATmega48A-48PA-88A-88PA-168A-168PA-328-328P_datasheet_Complete.pdf. Acessado em 07/082016
DS18B20. MAXIMINTEGRATED.COM. Disponível em: < http://datasheets.maximintegrated.com/en/ds/DS18B20.pdf> Acessado em 07/08/2016
UNISAL, Centro Universitário Salesiano de São Paulo. Algoritmos e Fluxogramas. Disponível em <http://galehp.com.br/doc/tecnologia/linguagem_de_programacao_I/Logica%20_Total.pdf> Acessado em 30/04/2013.
APÊNDICES
/* ********************************************
TCC –
AUTOR:ANDERSON RODRIGUES DE MOURA
EMAIL:[email protected]
*********************************************/
/* BIBLIOTECAS INCLUIDAS */
#include <DallasTemperature.h>
#include <OneWire.h>
//——————————-
// PORTA DO SENSOR ds18b20
#define ONE_WIRE_BUS 10
// Setup a oneWire instance to communicate with any OneWire devices
OneWire oneWire(ONE_WIRE_BUS);
// Pass our oneWire reference to Dallas Temperature.
DallasTemperature sensors(&oneWire);
//ENDERECO HEXADECIMAL DO SENSOR
DeviceAddress SENSORTEMP = { 0x28, 0xFF, 0x2D, 0x57, 0x54, 0x14, 0x00, 0x30 };
/* DEFININDO PINOS DOS LDR*/
#define LDR_ES A0 // ESQUERDA AZUL
#define LDR_DI A1 // DIREITA AMARELO
#define LDR_CI A2 // CIMA VERDE
#define LDR_BA A3 // BAIXO LARANJA
/*DEFININDO CONSTANTES DE DEBUG*/
#define DEBUG 13
/*DEFININDO CHAVES DE FIM DE CURSO*/
#define CHAVEHORIZONTAL 2
#define CHAVEVERTICAL 3
/*DEFININDO PINOS DO RELé*/
#define RL_MT_1_E 5 // RELÉ DO MOTOR 1 SENTIDO ESQUERDA
#define RL_MT_1_D 6 // RELé DO MOTOR 1 SENTUIDO DIREITA
#define RL_MT_2_C 7 // ReLé DO MOTOR 2 SENTIDO CIMA
#define RL_MT_2_B 8 // RELé DO MOTOR 2 SENTIDO BAIXO
/* DEFININDO VÃLVULA SOLENÓIDE */
#define SOLENOIDE 11
/*DEFININDO VALOR DA MARGEM DE ERRRO E TEMPO DE ACIONAMENTO DOS MOTORES*/
#define MARGEMERRO 20
#define TEMPOACIONAMENTO 600
/* VARIAVEIS */
int LDR_ESQ; //Variável para a leitura do LDR ESQUERDA
int LDR_DIR; //Variável para a leitura do LDR DIREITA
int LDR_CIM; //Variável para a leitura do LDR CIMA
int LDR_BAI; //Variável para a leitura do LDR BAIXO
void setup(){
// iniciando a biblioteca
sensors.begin();
// configurando a resolucao para 10 bit
sensors.setResolution(SENSORTEMP, 10);
pinMode(RL_MT_1_E,OUTPUT); //Define o pino como saÃda
pinMode(RL_MT_1_D,OUTPUT); //Define o pino como saÃda
pinMode(RL_MT_2_C,OUTPUT); //Define o pino como saÃda
pinMode(RL_MT_2_B,OUTPUT); //Define o pino como saÃda
pinMode(DEBUG,OUTPUT); //Define o pino como saÃda
pinMode(CHAVEHORIZONTAL,INPUT); //Define o pino como ENTRADA
pinMode(CHAVEVERTICAL,INPUT); //Define o pino como ENTRADA
pinMode(SOLENOIDE,OUTPUT);
Serial.begin(9600); //Inicia a serial para debug
Serial.println(“INICIALIZANDO SISTEMA …”);
/*SOM PARA INDICAR O INICIO DO SISTEMA*/
debug(true);
delay(1000);
debug(false);
// — – – — – ———
Serial.println(“SISTEMA PRONTO …”);
}
void loop(){
/*ZERANDO AS VARIAVEIS PARA NOVA LEITURA*/
LDR_ESQ = 0; //Variável para a leitura do LDR ESQUERDA
LDR_DIR = 0; //Variável para a leitura do LDR DIREITA
LDR_CIM = 0; //Variável para a leitura do LDR CIMA
LDR_BAI = 0; //Variável para a leitura do LDR BAIXO
for(int i=0;i<=10;i++){ //Faz 10 vezes a leitura do sensor
LDR_ESQ += analogRead(LDR_ES); //Variável para a leitura do LDR ESQUERDA
LDR_DIR += analogRead(LDR_DI); //Variável para a leitura do LDR DIREITA
LDR_CIM += analogRead(LDR_CI); //Variável para a leitura do LDR CIMA
LDR_BAI += analogRead(LDR_BA); //Variável para a leitura do LDR BAIXO
delay(10); //Delay se 10 milissegundos 😀
}/*DEFININDO MEDIA DAS LEITURAS DOS LDR*/
LDR_ESQ = LDR_ESQ / 10;
LDR_DIR = LDR_DIR / 10;
LDR_CIM = LDR_CIM / 10;
LDR_BAI = LDR_BAI / 10;
verNoite(LDR_BAI,LDR_CIM,LDR_ESQ,LDR_DIR);
Serial.print(“Esquerda: “); //Imprime o valor do LDR para debug
Serial.println(LDR_ESQ); //Imprime o valor do LDR para debug
Serial.print(“Direita: “);
Serial.println(LDR_DIR); //Imprime o valor do LDR para debug
//Serial.println(“\n\n”);
Serial.print(“Cima: “);
Serial.println(LDR_CIM); //Imprime o valor do LDR para debug
Serial.print(“Baixo: “);
Serial.println(LDR_BAI); //Imprime o valor do LDR para debug
Serial.println(“\n\n”);
delay(500);
/* TESTES DE VALORES E MOVIMENTO DOS MOTORES*/
/* MOTOR HORIZONTAL */
if((LDR_ESQ > LDR_DIR) && ((LDR_ESQ – LDR_DIR) > MARGEMERRO)){ // (ldr_es – ld_dir > valor)
/*ACIONA O MOTROR PARA MOVIMENTAR O RASTREADOR PARA A DIREITA*/
debug(true);
digitalWrite(RL_MT_1_D, HIGH);
delay(TEMPOACIONAMENTO);
digitalWrite(RL_MT_1_D, LOW);
debug(false);
}else if((LDR_DIR > LDR_ESQ) && ((LDR_DIR – LDR_ESQ) > MARGEMERRO )){
/*ACIONA O MOTROR PARA MOVIMENTAR O RASTREADOR PARA A ESQUERDA*/
debug(true);
digitalWrite(RL_MT_1_E, HIGH);
delay(TEMPOACIONAMENTO);
digitalWrite(RL_MT_1_E, LOW);
debug(false);
}
/* MOTOR VERTICAL */
if((LDR_CIM > LDR_BAI) && ((LDR_CIM – LDR_BAI) > MARGEMERRO)){
/*ACIONA O MOTROR PARA MOVIMENTAR O RASTREADOR PARA A CIMA*/
debug(true);
digitalWrite(RL_MT_2_B, HIGH);
delay(TEMPOACIONAMENTO);
digitalWrite(RL_MT_2_B,LOW);
debug(false);
}else if((LDR_BAI > LDR_CIM) && ((LDR_BAI – LDR_CIM) > MARGEMERRO)){
/*ACIONA O MOTROR PARA MOVIMENTAR O RASTREADOR PARA A CIMA*/
debug(true);
digitalWrite(RL_MT_2_C, HIGH);
delay(TEMPOACIONAMENTO);
digitalWrite(RL_MT_2_C,LOW);
debug(false);
}
/*VERIFICA SE A TEMPERATURA ESTA EM TEMPERATURA DE EBULICAO*/
if(lerTemperatura() >=100){
digitalWrite(SOLENOIDE,HIGH);
}else{
digitalWrite(SOLENOIDE,LOW);
}
}
float lerTemperatura(){
sensors.requestTemperatures();
return sensors.getTempC(SENSORTEMP);
}
void debug(bool liga){
if(liga){
digitalWrite(DEBUG,HIGH);
}else{
digitalWrite(DEBUG,LOW);
}
}
void verNoite(int LDR_BAI,int LDR_CIM,int LDR_ESQ,int LDR_DIR){
Serial.println(digitalRead(CHAVEVERTICAL));
//if((LDR_BAI && LDR_CIM && LDR_ESQ && LDR_DIR) < 5){
if(((LDR_BAI + LDR_CIM + LDR_ESQ + LDR_DIR) / 4) < 5){
//movimentar antena ate chegar nos sensores …..
if(digitalRead(CHAVEVERTICAL)){
Serial.println(“LIGA VERTICAL”);
debug(true);
digitalWrite(RL_MT_1_D,HIGH);
delay(2000);
digitalWrite(RL_MT_1_D,LOW);
}else if(digitalRead(CHAVEHORIZONTAL)){
debug(true);
Serial.println(“LIGA HOMER”);
digitalWrite(RL_MT_2_C,HIGH);
delay(2000);
digitalWrite(RL_MT_2_C,LOW);
}
debug(false);
}
}
[1] Tecnólogo em análise e desenvolvimento de sistemas.
[2] Especialista em Engenharia de Sistemas.
[3] Doutor em engenharia Agrícola. Mestre em física Aplicada. Graduado em física.
Enviado: Novembro, 2018
Aprovado: Dezembro, 2018
